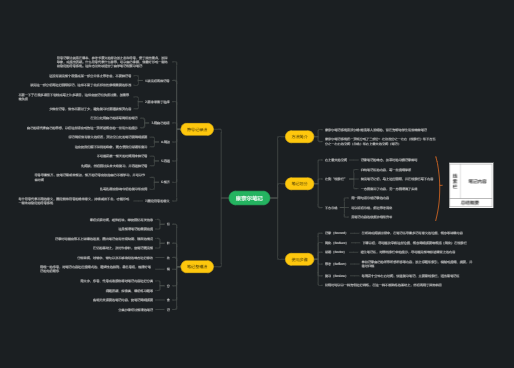
依赖缆绳,受气象/水文条件影响大
人为操作失误风险高(EMSA统计:80.1%事故由人为因素导致)
气象水文:大风、强潮、暴雨
船舶性能:大型船舶动量大、操控难(如Q-Max型LNG船)
人为因素:经验不足、操作失误
设备设施:防冲设备故障、清淤不及时
传感器系统、高精度定位、智能决策算法、动力控制系统
视觉激光融合技术(韩通赢吉专利,码头姿态优化)
三维激光点云数据(大连海事大学,环境感知)
无缆自动系泊系统(荷兰AMS磁性系泊,拉力达1000千牛)
5G+智能靠离泊系统(泰兴项目,5G-A通感+AI+北斗)
数字孪生技术(哈尔滨工程大学“海豚1”号,自主航行/避碰)
自主决策模型(上海船舶院研发,全水域自主航行)
低速运动建模:紧急制动、横向移动
低频运动控制:陀螺稳定器、模型预测技术
船岸协同感知:岸端-船端信息整合
智能无缆系泊:真空/磁力技术替代缆绳
"智腾"号(2019,三自由度操纵模型)
"智飞"号(2022,无人驾驶集装箱船)
Mikage船(2023,无人机全自动靠泊)
汐路丸号(2018,2025年计划商用)
"Prism Courage"号(2022,LNG船跨洋自主航行)
"Eidsvaag Pioner"号(2023,AUTOSHIP项目里程碑)
"Zulu04"号(比利时,无限制水域测试)
真空技术:Cavotec MoorMaster NxG
磁力技术:Mampaey Dock Locking System
自张紧装置:MacGregor MOOREX("Yara Birkeland"号)
动态调节:Trelleborg DynaMoor(液压阻尼器)