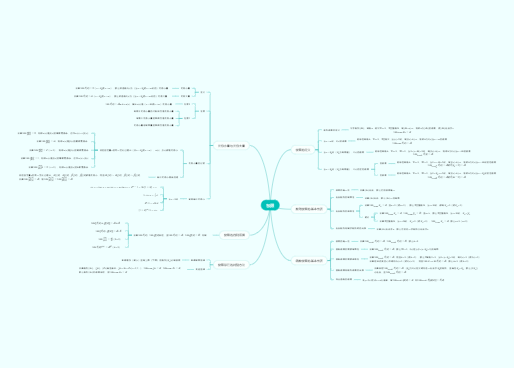
2.1.1 电阻应变片的工作原理(p33-p35)
电阻表达式
电阻的相对变化量
灵敏系数
电阻相对变化量
对于电阻应变片,金属材料的电阻率随应变产生的变化很小,所以可得:
市售的金属应变片的电阻已趋于标准化,主要规格有60、120、350、600和1000欧姆等,其中120欧姆的用的最多。
,,其中K称为电阻应变片的灵敏度系数。
电阻应变片的灵敏度系数K小于金属单丝的灵敏度系数K。(原因)
粘结层传递变形失真
还存在横向效应
原因:应变片的横栅部分将纵向丝栅部分的电阻变化抵消了一部分,从而降低了整个应变片的灵敏度。
解决:横向效应给测量带来了误差,其大小与敏感栅的构造及尺寸有关。敏感栅的纵向丝栅越窄、越长,而横栅越宽、越短,则横向效应的影响越小。
敏感栅的金属丝阻止随温度变化的关系可由下式表示:当温度变化时,金属丝阻止变化:(虚假输出)
当试件与金属丝材料的线膨胀系数不同时,由于环境温度的变化,金属丝会产生附加变形,从而产生附加电阻:( 。)
总附虚假误差:
当被测试件不承受应变时,在同一温度调整电桥达到平衡:=0
选择式自补偿应变片:
双金属敏感栅自补偿应变片:
热敏电阻补偿法
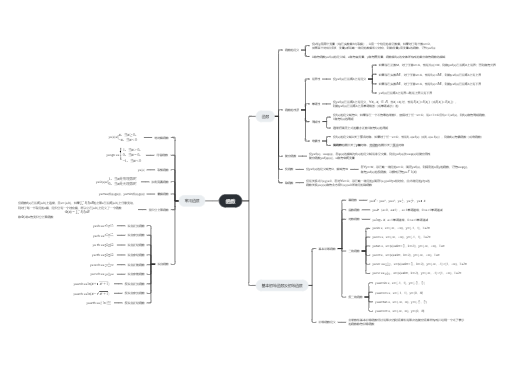
2.1.3 电阻应变片的测量电路(p38-p40)
输出电压:
当
单桥臂理想的线性关系:
非线性误差:
半桥差动电路输出电压:
半桥电路图
全桥差动电路输出电压:
全桥电路图
单臂
半桥电路不仅能消除非线性误差,而且还使带电桥的输出灵敏度比单臂工作效率提高了一倍,同时还能起温度补偿作用。 全桥电路不仅能消除非线性误差,而且还使带电桥的输出灵敏度比单臂工作效率高四倍,同时还能起温度补偿作用。
2.1.4 电阻应变片传感器的应用(p40-P48)
(1)柱式力传感器(p40-41):其中E为弹性元件的弹性模量
(2)梁式力传感器(p41-42):
(3)薄壁圆环式力传感器(p42)
(4)机器人腕力传感器(p42-43)
(1)膜片式压力传感器(p43-p44)
(2)筒式压力传感器(p44)
(3)组合式压力传感器(p44-45)
3、应变式容器内液体重量传感器(p45-46)输出电压:;。由这两公式得出输出电压为:
4、应变式加速传感器(p46)
5、应变式扭矩传感器(p46-48)
6、应变式张力传感器(p48)