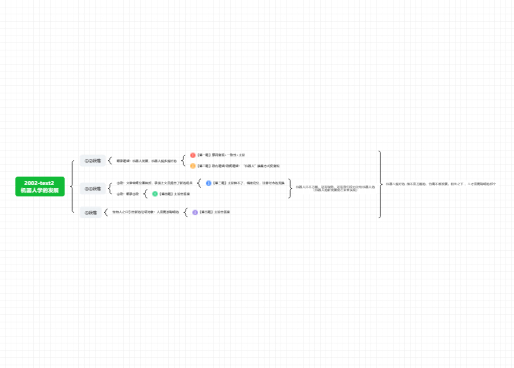
机构简单
与地面为连续点接触
效率极大地依赖于环境情况,特别是地面的平坦和硬度,在
非结构环境中移动性能较差
与地面为许续面接触,可较好地适应不平整地面和松软地面
稳定性好、接地比压大、牵引力大
会对地面造成较大磨损
适合于军事、救援等领域
能够适应复杂多变的地形
能够适应不同的地面状况
能够跨越障碍物和沟壑
具有较小的地面支撑压力
能够主动调节身体高度
能够主动隔振、确保稳定
具有静态稳定运动容错性
能够利用腿足操作物体
离散落脚点
多自由度、多肢体
腿部多关节、对驱动和机构要求高、成本高
自由度高,不易建模控制
易受扰动而失稳,例如DAPRA
能耗高
依附于空间的移动方式,以仿生为主要研发趋势
室内/室外
结构/半结构/非结构
陆地、水下、空中、空间
工业、农业、军事、服务